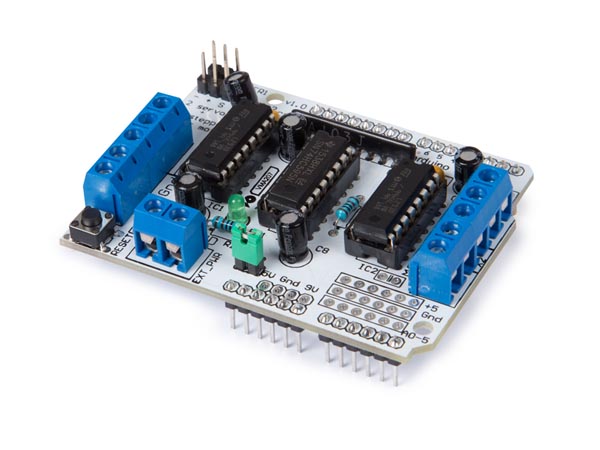
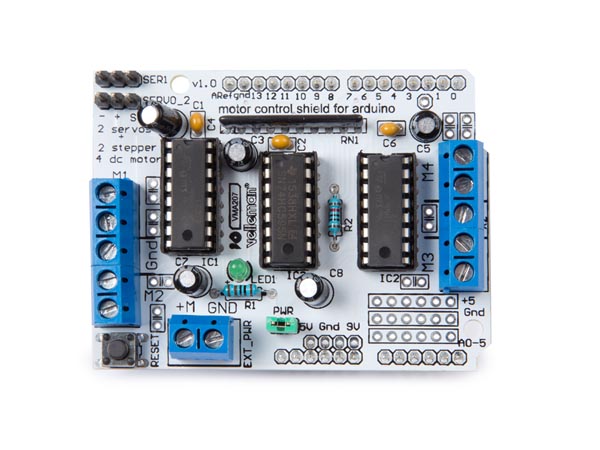
Le shield inclut deux drivers L293D et un registre à décalage 74HC595. Celui-ci étend 3 broches de l'Arduino jusqu'à 8 broches pour contrôler le sens de rotation des drivers. Les sorties 'output enable' du L293D sont directement connectées aux sorties PWM de l'Arduino (modulation de largeur d'impulsions).
- 2 puces L293D - 4 ponts en H - 0.6 A par pont (1.2 A en courant de crête) - Protection thermique - Diodes de roue libre intégrées - Max. 4 moteurs CC bidirectionnels - Max. 2 moteurs pas-à-pas - Des résistances 'pull down' désactivent les moteurs pendant la mise sous tension - 2 interfaces d'alimentation pour séparer la partie logique de la partie moteurs - Borniers à vis pour moteurs et alimentation - Convient aux moteurs de 4.5 VCC - 16 VCC - 2 connexions pour servomoteurs de modélisme de 5 V
- Dimensions: 6.8 cm x 5.5 cm x 2 cm
Votre snippet dynamique sera affiché ici...
Ce message s'affiche parce que vous n'avez pas défini le filtre et le modèle à utiliser.
Le respect de votre vie privée est notre priorité.
Autoriser l'utilisation des cookies de ce site web sur ce navigateur ?
Nous utilisons des cookies pour améliorer l'expérience sur ce site web. Vous pouvez en savoir plus sur nos cookies et sur la manière dont nous les utilisons dans notre Politique en matière de cookies.